26.07.2016 13:07
Позиционирование является одной из основных задач электропривода, особенно в приложении управления движением (motion control).
Инженер по автоматизации встречает задачи позиционирования довольно часто в своей практике.
Это и позиционирование заслонки клапана, направляющего аппарата, позиционирование конвейера, нажимного винта прокатного стана, тележки порционного дозирования, автостеллы, подъемника. У машиностроителей вообще всего три проблемы, с которыми они борятся на протяжении карьеры - это не едет, переезжает или недоезжает.
Прецизионное позиционирование с точностью от десятых долей миллиметра и выше, учитывающее множество дополнительных факторов успешно решается с помощью сервоприводов производства Delta Electronics семейства ASD.
Однако и обычный общепромышленный частотный преобразователь C2000 может быть использован для многих задач позиционирования со всей своей неприхотливостью, производительностью и мощностью, в непрецизионных приложениях, для которых точность позиционирования миллиметр или меньше не является особой проблемой.
В данной статье демонстрируется, как с сконфигурировать привод серии C2000 для позиционирования и как передать уставку позиции по протоколу Profibus из ПЛК Siemens S7 используя TIA PORTAL.
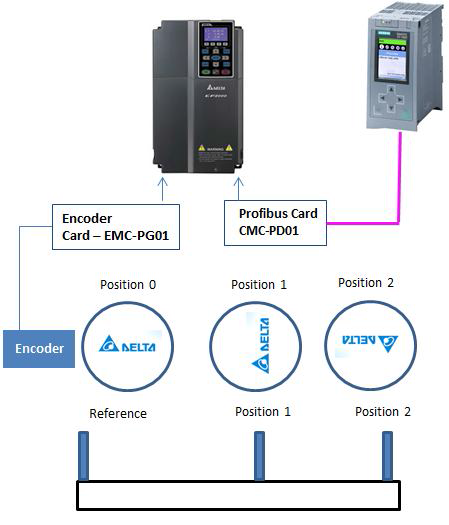
Рис 1 – Система позиционирования включает в себя C2000 с дополнительными платами энкодера и шины Profibus, ПЛК S7 1500 и собственно сети.
Необходимое оборудование
Полный перечень необходимого оборудования и ПО:
-
Преобразователь Delta C2000 + мотор + энкодер
-
EMC-PG01 - плата энкодера
-
S7-1500 с прошивкой Profibus версии не ниже 1.8 , если ниже, требуется обновление .
-
TIA PORTAL V12/V13
-
Кабель Profibus DP с разъемами со встроенными резисторами, удовлетворяющий спецификации Profibus,
Для того, что бы иметь возможность работать с позиционированием, необходимо установить в привод С2000 дополнительную плату энкодера, соответствующую его типу, например EMC-PG01, а так же плату интерфейса Profibus-DP CMP-01. Не забудьте подсоединить землю (GND) платы энкодера к общей земле GND, иначе не исключен отказ энкодера.
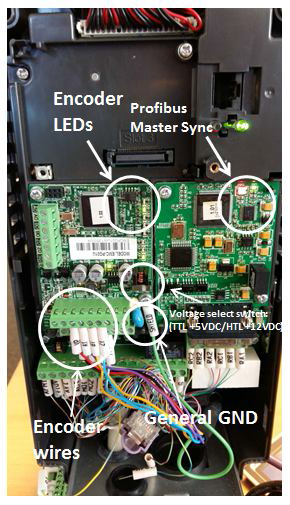
Рис. 2 – C2000 с установленной платой энкодера и шины Profibus без активного Master-а в системе
Установка и конфигурация энкодера
Правильный выбор энкодера является фундаментальным фактором успеха для конкретного приложения позиционирования. Если приложения требует быстрой реакции, необходимо обратить внимание на частоту энкодера и на его совместимость с частотой опроса платы EMG-PG01.
К преобразователю частоты VFD-C2000 могут быть подключены самые разные типы энкодеров, как производства Delta, так и сторонних производителей, на разное напряжение питания и по разным схемам подключения. Обратите внимание на раздел 3 руководства С2000.
Конфигурация мотора
Несмотря на то, что считается, что синхронные двигатели на постоянных магнитах более подходят для задач позиционирования, привод VFD-C2000 может использовать и обычные асинхронные двигатели для этих целей.
Как обычно, перед использованием ПЧ в векторном режиме необходимо пройти процедуру автотестирования двигателя. При этом очень желательно, что бы имелась возможность отсоединить двигаетль от нагрузки и провести динамическое автотестирование
Поиск начального положения
Инкрементальные энкодеры не запоминают свою позицию при пропадании питания, поэтому сразу же после включения необходимо найти точку отсчета , относительно которой будет осущетсвляться дальнейшее движение.
Процесс поиска начального положения называется хомингом (homing). В хоминге задействованы 3 дискретных входа частотника - два - для концевых выключателей предельных позиций, ограничивающих область поиска и один - собственно сигнал достижения начальной точки отчета.
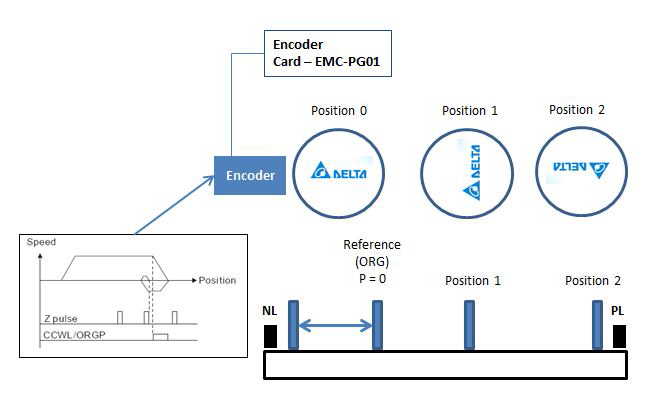
Рис.3. Поиск точки отсчета (Reference ORG). NL и PL - конечные путевые выключатели
Для C2000 существует множество режимов поиска начального положения, задаваемого параметром 0-40. В руководстве приведены 8 возможных диаграмм скоростей поиска начальной позиции.
Позиционирование.
После того, как правильно настроен векторный режим преобразователя и успешно найдена начальная позиция, дальнейшее позиционирование требует реализации 4-х простых вещей:
-
Переключить ПЧ в режим позиционирования (P2P)
-
Выбрать абсолютное, либо относительное позиционирование
-
Определить, откуда будет поступать задание ( команда) на позицию
-
Мониторить выполнение команд позиционирования
Все это будет выполняться внешним ПЛК, в данном случае Siemens S7 по протоколу Profibus DP.
Однако первоначально необходимо сконфигурировать следующие параметры преобразователя:
-
00-10 - метод управления - P2P
-
00-12 - режим позиционирования - абсолютный или икрементальный
-
11-40 - источник уставки (команды) позиции - внешняя клемма, внутренний ПЛК, CAN,RS-485 или коммуникационная плата.
Единицей измерения перемещения являются импульсы ppr , либо отсчеты cpr энкодера. За каждый оборот вала экодер со стандартным парафазным выходным сигналом ABZ генерирует N имульсов и 4N отсчетов, включающие в себя все фронты прямых и инверсных фаз. Таким образом энкодер с разрешением 2500 ppr импульсов на оборот генерирует 2500х4 = 10 000 cpr отсчетов, которые мы и должны принимать во внимание.
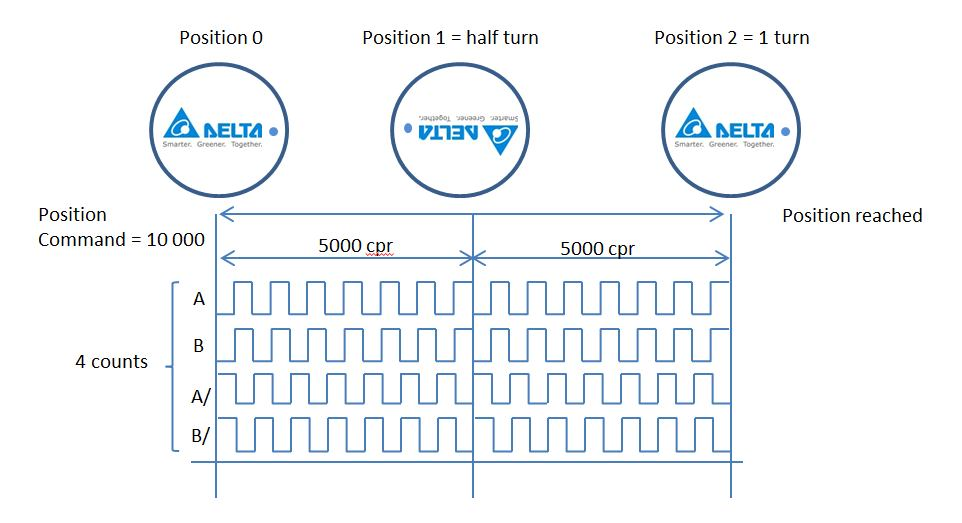
Рис.4. Единицы измерения команды перемещения
В C2000 команды позиционирования всегда измеряются в количестве отсчетов. В нашем примере именно это количество должно пересылаться через Profibus PZD память.
Если у нас энкодер выдает 1024 импульса на оборот, тогда цена одного оборота будет 4096 отсчетов. Поэтому,если мы измеряем перемещение в оборотах, команда на перемещение должна равнятся 4096 x число оборотов. Таким образом мы можем очень точно задавать положение вала двигателя.
Настройка контроллера S7-1500 и сети Profibus-DP
TIA портал начинает “видеть” привод C2000 после установки файла Delta C2000 .gsd в конфигурацию оборудования
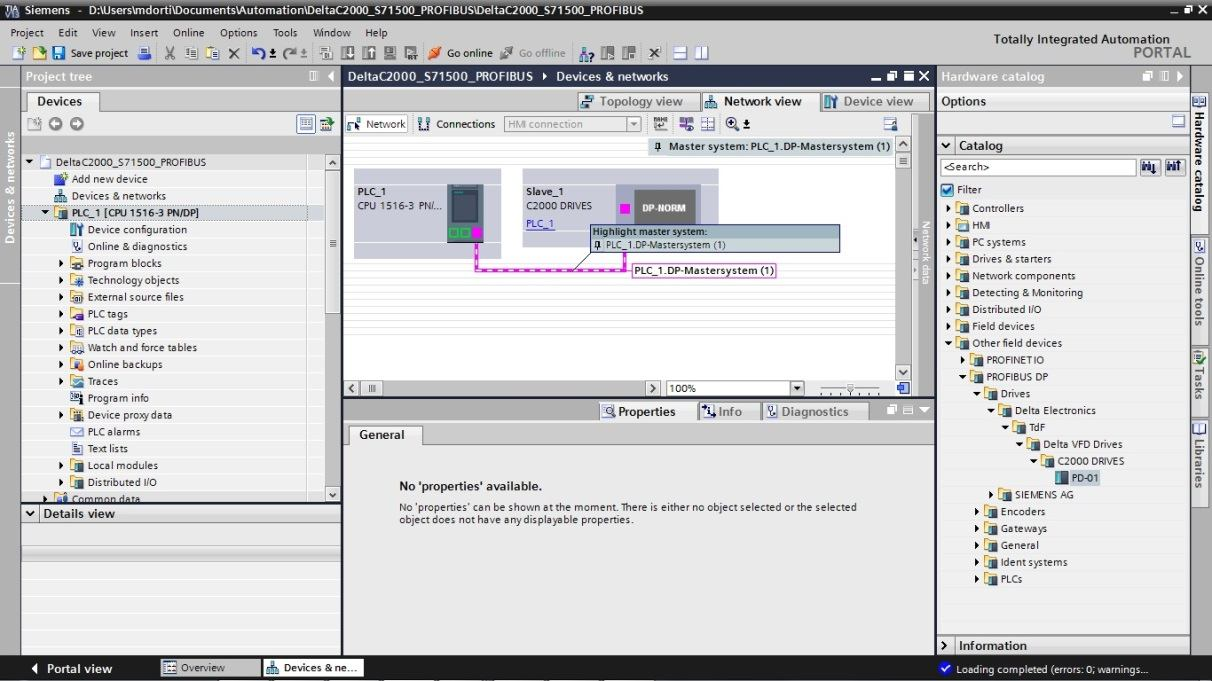
Рис 5. Начальная конфигурация оборудования с VFD-C2000
Далее необходимо определить данные, которые будут пересылаться с привода в ПЛК и из ПЛК в привод
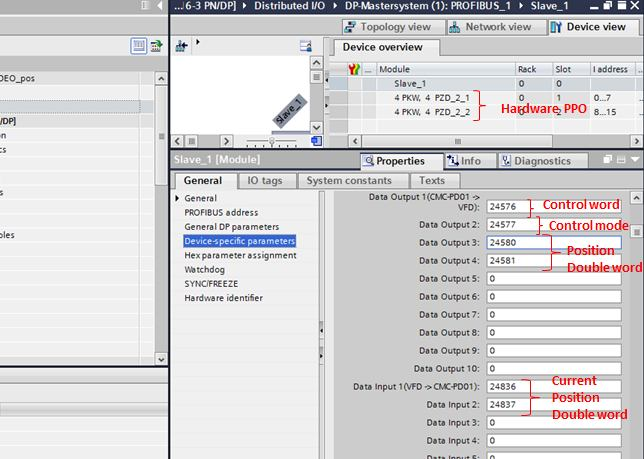
Рис 6. Общие параметры устройства - данные пересылаемые из привода и в привод
Дальше в ПЛК заводятся теги, а так-же добавляются необходимые функциональные блоки обмена в организационный блок OB1
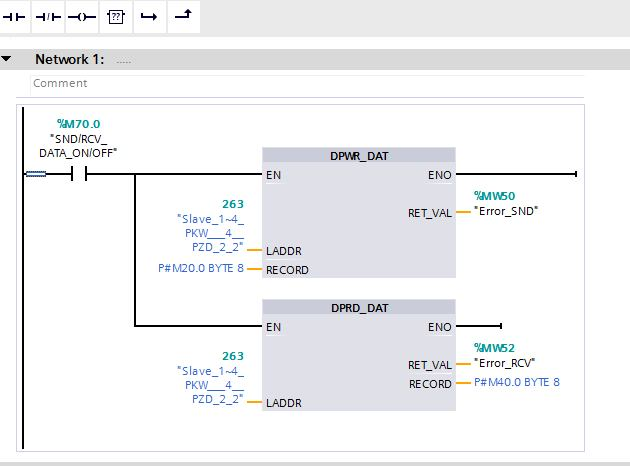
Рис 7. Фрагмент программы обмена ПЛК S7-1500
В примере в привод из ПЛК будут передаваться
-
слово управления
-
режим позиционирования
-
Задание ( комманда) на позицию
Из привода ПЛК будет циклически вычитывать реальное положение вала
Таким образом настройка привода на режим позиционирования, поиск начальной позиции, само позиционирование и мониторинг реального положения вала осуществляется с помощью программ ПЛК Siemens
При написании програм следует помнить, что ПЛК Siemens наследуют архитектуру регистров компании Motorola, в результате чего по сети Profibus DP вначале пересылается младший байт слова позиции, а затем старший.
Отладка
Все передаваемые в привод данные , а так же вычитываемые из привода отображаются в стандартной таблице Watch table TIA Portal.
Пользователь имеет возможность не только контролировать, но и изменять на лету эти данные:
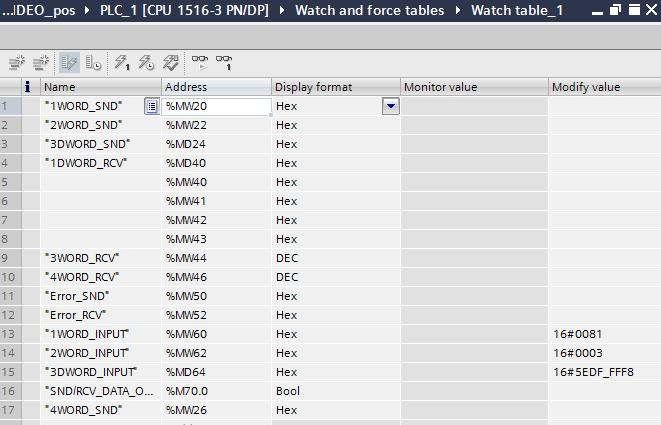
Рис 8. Мониторинг обмена с помощью Watch Table
Кроме того позицию можно считать со стандартного пульта привода VFD-C2000
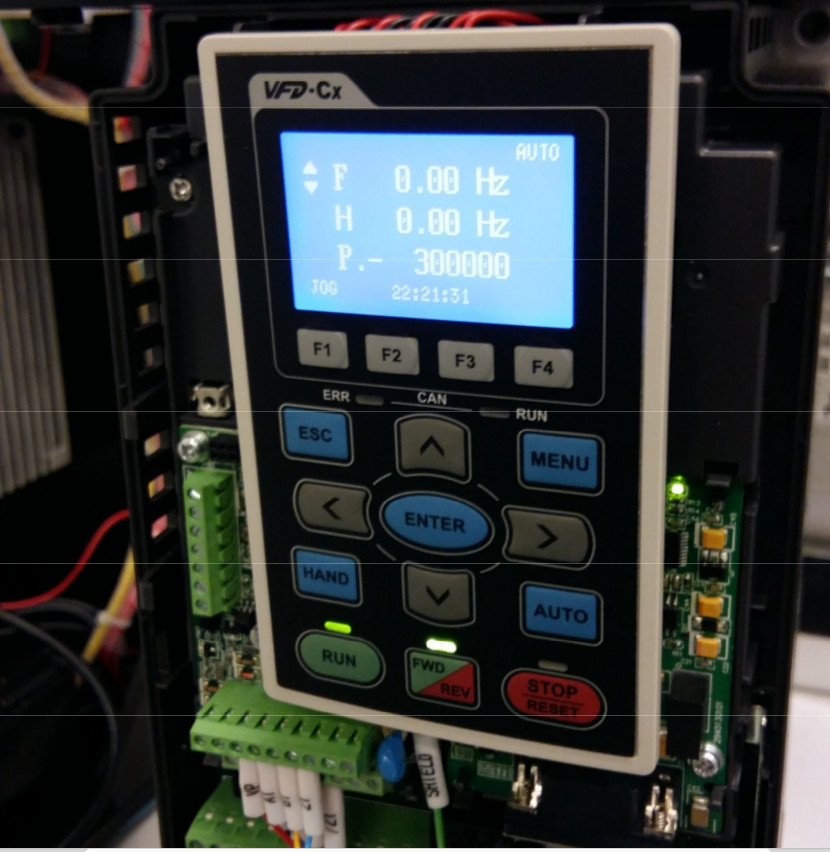
Рис 9. Отображение позиции на стандартном пульте ПЧ
Точность и качество отработки команд позиционирования во многом зависит от качества настройки векторного режима привода VFD-C2000.
Векторный режим режим преобразователей частоты серии C2000 Delta построен по классической схеме с использованием преобразований Кларка и Парка с переходом к вращающейся системе координат с наблюдателем и имеет множество тонких настроек, с помощью которых можно добиться большей точности, удерживающего момента и плавности хода.
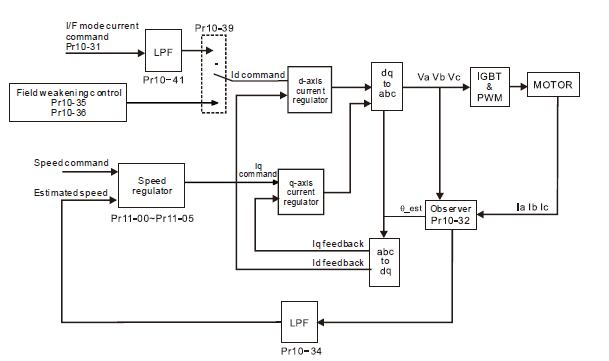
Рис. 10. Архитектура векторного режима преобразователя частоты C2000
C помощью дополнительных параметров можно настроить полосу пропускания регуляторов на высокой скорости, на низкой скорости и на нулевой скорости, времена разгона и торможения, токи намагничивания.
Заключение
Режим позиционирования P2P, имеющийся в каждом стандартном общепромышленном приводе серии C2000 Delta Electronics обладает достаточным функционалом для решения большинства задач позиционирования невысокой точности.
Так, команда на позиционирование может поступать как ввиде импульсов на цифровые входы привода, так и по популярным полевым шинам Modbus, Profibus, CAN от смежного оборудования как Delta Electronics, так и сторонних производителей. Кроме того всем приводом и его позиционированием может управлять встроенный внутренний ПЛК, программируемый технологическими языками.
Независимо от источника задания позиции (команды) , привод сам ищет начальную точку и обрабатывает сигналы путевых конечных выключателей по одному из 8-ми стандартных алгоритмов при первом включении питания.
Широкий диапазон мощностей до сотен киловат, возможность использования недорогих асинхронных двигателей, неприхотливость, доступность на складе, конкурентоспособная цена, встроенный полноценный ПЛК, программируемый языками стандарта МЭК, совместимость с популярными полевыми шинами, бесплатность ПО - драматически удешевляют и ускоряют решения часто встречающихся задач позиционирования в различных отраслях.
Настоящая статья не является пошаговым руководством, а лишь демонстрирует принцип реализации непрецезионного позиционирования с помощью общепромышленных преобразователей частоты Delta Electronics.
Более подробную информацию можно получить в документах на английском языке ниже, а так же у официального партнера Delta Electronics в Украине, компании RTS-Ukraine.
Звоните нам сейчас, вместе мы можем многое !
Дополнительно
 Positioning with C2000 and S7 Siemens in Profibus-DP (английский pdf 2,1 Мбайт)
Positioning with C2000 and S7 Siemens in Profibus-DP (английский pdf 2,1 Мбайт)
Delta C2000 & Siemens S7 1500/1200 - PROFIBUS communication (английский pdf 5,5 Мбайт)
 Программа примера для S7-1500 (2.6 Мбайт)
Программа примера для S7-1500 (2.6 Мбайт)
Таблица параметров привода VFD-C2000, оптимизированного для позиционирования (15 Кбайт)




