|  |
дНОСЯРХЛ бШ ЦСПС Б ЩКЕЙРПНОПХБНДЕ... |
26.03.2012 13:58 яНГДЮМХЕ ╚ФХБШУ╩ НОЕПЮРНПЯЙХУ ОЮМЕКЕИ МЕ РПЕАСЕР ЯЙНКЭ-МХАСДЭ ЯЕПЭЕГМШУ МЮБШЙНБ ОПНЦПЮЛЛХПНБЮМХЪ. я ЩРНИ ГЮДЮВЕИ ЯЛНФЕР ЯОПЮБХРЭЯЪ КЧАНИ ЬЙНКЭМХЙ ХКХ ЯРСДЕМР, ГМЮЙНЛШИ УНРЪ АШ c аЕИЯХЙНЛ. уНРХРЕ МЮСВХРЭЯЪ ЯЮЛНЯРНЪРЕКЭМН ДЕКЮРЭ РЮЙХЕ ЯХЯРЕЛШ? дНОСЯРХЛ – БШ «ЦСПС» Б ЩКЕЙРПНОПХБНДЕ Х ГЮОСЯРХКХ МЕ НДХМ ОПЕНАПЮГНБЮРЕКЭ ВЮЯРНРШ Х МЕ МЮ НДМНЛ НАЗЕЙРЕ. рНЦДЮ бШ МЮБЕПМЪЙЮ БЯРПЕВЮКХЯЭ Я РЕЛ, ВРН БЮЬХЛ ОПХБНДНЛ (Х МЕ РНКЭЙН ХЛ) Б ХРНЦЕ СОПЮБКЪЕР ДХЯРЮМЖХНММН НОЕПЮРНП, Я ОНЛНЫЭЧ МЕЙНЕИ ЙНЛОЭЧРЕПМНИ ЯХЯРЕЛШ, ОПНЯРН РШЙЮЪ ОЮКЭЖЕЛ ХКХ ЛШЬЙНИ Б ЙПЮЯХБШЕ «ФХБШЕ» ЙЮПРХМЙХ МЮ ЩЙПЮМЕ, НРНАПЮФЮЧЫХЕ ЯЮЛ ЮЦПЕЦЮР, ЛЕМЪЧЫХЕЯЪ ЖХТПШ Х АЕЦСЫХЕ ЦПЮТХЙХ ОЮПЮЛЕРПНБ, ЯРНКАХЙХ СПНБМЕИ, ЯРПЕКЙХ МЮПХЯНБЮММШУ ОПХАНПНБ Х ЖЕКШЕ ЛСКЭРТХКЭЛШ Я ДБХФСЫХЛХЯЪ ЙНМБЕИЕПЮЛХ, БПЮЫЮЧЫХЛХЯЪ МЮЯНЯЮЛХ, БЕМРХКЪРНПЮЛХ Х АЕЦСЫЕИ ФХДЙНЯРЭЧ.
уНРХРЕ МЮСВХРЭЯЪ ЯЮЛНЯРНЪРЕКЭМН ДЕКЮРЭ РЮЙХЕ ЯХЯРЕЛШ? «мЕ УНВС», - ЯЙНПЕЕ БЯЕЦН, НРБЕРХРЕ бШ, - «оНРНЛС ВРН ЩРН ДНПНЦН», ХКХ «оНРНЛС ВРН С ЛЕМЪ ЮККЕПЦХЪ МЮ ОПНЦПЮЛЛХПНБЮМХЕ», «оНРНЛС ВРН ЩРН МЕ ЛНИ АХГМЕЯ, Б ЙНМЖЕ ЙНМЖНБ» — БНГЛНФМШ КЧАШЕ ДПСЦХЕ БЮПХЮМРШ ЮПЦСЛЕМРЮЖХХ.
дЕИЯРБХРЕКЭМН, ДКЪ ЯНГДЮМХЪ ОНДНАМШУ ЯХЯРЕЛ ЙКЮЯЯХВЕЯЙХЛ ОСРЕЛ, БЮЛ ОНМЮДНАХРЯЪ ЯНРПСДМХВЕЯРБН Я ЕЫЕ НДМХЛ ЦСПС, ОПХВЕЛ ВЮЯРН ЙЮОПХГМШЛ – ЦСПС-ОПНЦПЮЛЛХЯРНЛ, Ю ЛНФЕР Х МЕ Я НДМХЛ. б ЯЮЛНЛ ДЕКЕ, ДЮФЕ ЯНЯРЮБКЕМХЕ ЯОЕЖХТХЙЮЖХХ ОНЙСОМШУ ЯПЕДЯРБ ЮБРНЛЮРХГЮЖХХ ОНДНАМШУ ЯХЯРЕЛ БШКХБЮЕРЯЪ Б ЯЕПЭЕГМСЧ ГЮДЮВС, РПЕАСЧЫСЧ УНРЪ АШ ЩЯЙХГМНЦН ОПЕДБЮПХРЕКЭМНЦН ОПНЕЙРХПНБЮМХЪ.
дКЪ ЙЮФДНИ БШАПЮММНИ «ФЕКЕГЪЙХ» МСФМН ОНДНАПЮРЭ ЯННРБЕРЯРБСЧЫХИ «ЯНТР», БШАПЮБ ХГ МЕЯЙНКЭЙХУ БЮПХЮМРНБ, НРКХВЮЧЫХУЯЪ ОН ЖЕМЕ Б ПЮГШ. бНГЛНФМН, ОПХДЕРЯЪ ХГСВХРЭ, ВРН РЮЙНЕ «РЩЦ», «РНВЙЮ ББНДЮ/БШБНДЮ», «ОКЮБЮЧЫЮЪ КХЖЕМГХЪ» Х ВРН ОНД ЩРХЛ ОНМХЛЮЕР ЙНМЙПЕРМШИ ОПНХГБНДХРЕКЭ. лЮКН РНЦН, ЙЮФДЮЪ МЕДЕЬЕБЮЪ «ЯНТРХМЮ» ЛНФЕР РПЕАНБЮРЭ ДКЪ ПЮАНРШ ЕЫЕ НДМНИ ХКХ МЕЯЙНКЭЙХУ, МЕ ЛЕМЕЕ МЕДЕЬЕБШУ ОПНЦПЮЛЛМШУ ЙНЛОНМЕМРНБ «НАЫЕЦН МЮГМЮВЕМХЪ» НР ДПСЦХУ ОПНХГБНДХРЕКЕИ, МЮОПХЛЕП, SQL ЯЕПБЕПЮ, ХКХ ЯЕПБЕПМНИ НОЕПЮЖХНММНИ ЯХЯРЕЛШ.
аНКЭЬХМЯРБН ОПНХГБНДХРЕКЕИ БНГБПЮЫЮЧР ХМБЕЯРХЖХХ Б ПЮГПЮАНРЙС, ОПНДЮБЮЪ КХЖЕМГХНММНЕ ОПНЦПЮЛЛМНЕ НАЕЯОЕВЕМХЕ, ГЮЫХЫЕММНЕ НР ЙНОХПНБЮМХЪ, ХЛЕЧЫЕЕ Й РНЛС ФЕ РЕ ХКХ ХМШЕ НЦПЮМХВЕМХЪ, ЙНРНПШЕ ЛНФМН ЯМЪРЭ КХЬЭ ГЮ ДНОНКМХРЕКЭМСЧ ОКЮРС. мЮЬХ ФЕ ПЕЮКХХ ОПХБНДЪР Й РНЛС, ВРН ОН ПСЙЮЛ УНДЪР «КНЛЮММШЕ» Х МЕ ЯЮЛШЕ ЯБЕФХЕ БЕПЯХХ, ЙНРНПШЕ МЕХГБЕЯРМН ЙЮЙ ПЮАНРЮЧР Х ОН ЙНРНПШЛ МЕКЭГЪ НТХЖХЮКЭМН ОПНЙНМЯСКЭРХПНБЮРЭЯЪ.
б ХРНЦЕ, ОПХБНДВХЙХ ОПЕДОНВХРЮЧР МЕ ЯБЪГШБЮРЭЯЪ ДЮФЕ Я ОПНЯРШЛХ ГЮДЮВЮЛХ, БПНДЕ ХМДХЙЮЖХХ МЮЦПСГНЙ Х ЯЙНПНЯРЕИ МЕЯЙНКЭЙХУ ДБХЦЮРЕКЕИ МЮ НДМНЛ ЩЙПЮМЕ, Ю ДХЯРЮМЖХНММНЕ СОПЮБКЕМХЕ ОПЕНАПЮГНБЮРЕКЪЛХ ВЮЯРНРШ ОПЕДОНВХРЮЧР ДЕКЮРЭ Я ОНЛНЫЭЧ ТХГХВЕЯЙХУ ЯХЦМЮКНБ Х ОНРЕМЖХНЛЕРПНБ. бНР Х УНДЪР НОЕПЮРНПШ (КХАН МЮКЮДВХЙХ) НР ЬЙЮТЮ Й ЬЙЮТС, ГЮОХЯШБЮЪ МЮ УНДС Б ФСПМЮК ОНЙЮГЮМХЪ ЯРПЕКНВМШУ ОПХАНПНБ ХКХ ЯВХРШБЮЪ, ВРН ОНЙЮГШБЮЕР ХМДХЙЮЖХЪ МЮ ВЮЯРНРМХЙЮУ, Х ЯБНДЪР Б ЦНКНБЕ НАЫСЧ ЙЮПРХМС – ОПЮБХКЭМН КХ ПЮАНРЮЕР ЯХЯРЕЛЮ ХКХ МЕР.
мН ЯХРСЮЖХЪ Б ЙНПМЕ ЛЕМЪЕРЯЪ, ЕЯКХ ОПНХГБНДХРЕКЭ ОПХМЖХОХЮКЭМН МЕ БЯРПЮХБЮЕР Б ЯБНЕ он МХЙЮЙХУ НЦПЮМХВЕМХИ, Х АНКЕЕ РНЦН, ПЮЯОПНЯРПЮМЪЕР ЕЦН ЯНБЕПЬЕММН АЕЯОКЮРМН. рЮЙ, С ОПНЦПЮЛЛМНЦН НАЕЯОЕВЕМХЪ, ПЮГПЮАНРЮММНЦН РПЮМЯМЮЖХНМЮКЭМНИ ЙНПОНПЮЖХЕИ Delta Electronics МЕР ДЕЛНМЯРПЮЖХНММШУ БЕПЯХИ ОН РНИ ОПНЯРНИ ОПХВХМЕ, ВРН БЯЕ БЕПЯХХ ЪБКЪЧРЯЪ «АНЕБШЛХ». ю ЯЮЛСЧ ЯБЕФСЧ БЕПЯХЧ БЯЕЦДЮ ЛНФМН ГЮЦПСГХРЭ Я ЯЮИРЮ www.deltaww.com.
дЮММШИ ЛЮРЕПХЮК ПЮЯЯЙЮФЕР ВХРЮРЕКЧ, ЙЮЙ Б ЩРНЛ ЯКСВЮЕ ОПНЯРН Х МЕДНПНЦН НЯСЫЕЯРБКЪЕРЯЪ ЯРШЙНБЙЮ ОПЕНАПЮГНБЮРЕКЕИ ВЮЯРНРШ Delta Electronics Я ЯЕМЯНПМШЛХ НОЕПЮРНПЯЙХЛХ ОЮМЕКЪЛХ РНЦН ФЕ ОПНХГБНДХРЕКЪ ДКЪ ОНКСВЕМХЪ ОПНДБХМСРНЦН ВЕКНБЕЙН-ЛЮЬХММНЦН ХМРЕПТЕИЯЮ, УЮПЮЙРЕПМНЦН ДКЪ ЯНБПЕЛЕММШУ SCADA ЯХЯРЕЛ.
лХМХЛЮКЭМНЕ ОПНЦПЮЛЛХПНБЮМХЕ, ЙНРНПНЕ ЛНФЕР ОНРПЕАНБЮРЭЯЪ ДКЪ МЮОХЯЮМХЪ ЛЮЙПНЯНБ, ЦСПС-ОПХБНДВХЙ БОНКМЕ ЛНФЕР ОНПСВХРЭ ЯБНЕЛС ЯШМС – ЯРСДЕМРС, ХЛЕЧЫЕЛС ОПЕДЯРЮБКЕМХЕ УНРЪ АШ Н аЕИЯХЙЕ.
яБЪГЭ ОН ОПНРНЙНКС.
яНБПЕЛЕММЮЪ ОПХБНДМЮЪ РЕУМХЙЮ ДНЬКЮ ДН РЮЙНЦН ЯНЯРНЪМХЪ, ВРН ЯБЪГЮРЭ ПЮГКХВМШЕ СЯРПНИЯРБЮ ОН ХГБЕЯРМНЛС Х НРЙПШРНЛС ОПНРНЙНКС НАЛЕМЮ МХЙЮЙХУ РПСДМНЯРЕИ МЕ БШГШБЮЕР, Х ЩРН ОН ЯХКЮЛ ДЮФЕ КХЖЮЛ, МЕЯБЕДСЫХЛ Б РНМЙНЯРЪУ ЮООЮПЮРМНИ Х ОПНЦПЮЛЛМНИ ПЕЮКХГЮЖХХ НАЛЕМЮ ДЮММШЛХ. цКЮБМНЕ, ВРНАШ БЯЕ СЯРПНИЯРБЮ ОНДДЕПФХБЮКХ ЕДХМШИ ОПНРНЙНК (ЦНБНПХКХ МЮ НДМНЛ ЪГШЙЕ). рЮЙХЛ ЕДХМШЛ ЯРЮМДЮПРМШЛ ОПНРНЙНКНЛ ДКЪ РЕУМХЙХ Delta Electronics ЪБКЪЕРЯЪ Modbus.
хЯОНКЭГНБЮМХЕ ДЮММНЦН ЯРЮМДЮПРЮ ОНГБНКЪЕР НАЛЕМХБЮРЭЯЪ ДЮММШЛХ МЕ РНКЭЙН ЛЕФДС ВЮЯРНРМХЙНЛ Х НОЕПЮРНПЯЙНИ ОЮМЕКЭЧ, МН ОНГБНКЪЕР БЙКЧВЮРЭ Б ЕДХМСЧ ЯЕРЭ НАЛЕМЮ ДЮММШЛХ КЧАШЕ СЯРПНИЯРБЮ – ДЮРВХЙХ, окй, ПЕЦСКЪРНПШ РЕЛОЕПЮРСПШ, ОЕПЕДЮБЮРЭ ДЮММШЕ МЮ НОЕПЮРНПЯЙХЕ юплШ. оПНРНЙНКШ Modbus Х ЯЕРХ ОЕПЕДЮВХ ДЮММШУ МЮ НЯМНБЕ ЯРЮМДЮПРЮ RS-485, ЦДЕ ХМТНПЛЮЖХЪ ОЕПЕДЮЕРЯЪ ОН БХРНИ ОЮПЕ Б БХДЕ РНЙНБШУ ЯХЦМЮКНБ, ОНДПНАМЕИЬХЛ НАПЮГНЛ НОХЯЮМШ Х ГДЕЯЭ ЛШ ХУ НАЯСФДЮРЭ МЕ АСДЕЛ.
лШ ГЮИЛЕЛЯЪ ДПСЦХЛ – МЮСВХЛЯЪ НАЛЕМХБЮРЭЯЪ ДЮММШЛХ ЛЕФДС ОПЕНАПЮГНБЮРЕКЕЛ ВЮЯРНРШ (Ю МЮ ЕЦН ЛЕЯРЕ ЛНФЕР АШРЭ КЧАНЕ ДПСЦНЕ СЯРПНИЯРБН Я Modbus), Х НОЕПЮРНПЯЙНИ ОЮМЕКЭЧ.
оЕПБНМЮВЮКЭМЮЪ МЮЯРПНИЙЮ.
хРЮЙ, С МЮЯ ЕЯРЭ ДБЮ СЯРПНИЯРБЮ – ОПЕНАПЮГНБЮРЕКЭ ВЮЯРНРШ Delta Electronics (Б НОХЯШБЮЕЛНЛ ОПХЛЕПЕ ЩРН VFD007E21T) Х НОЕПЮРНПЯЙЮЪ ОЮМЕКЭ РНЦН ФЕ АПЕМДЮ – ЛНДЕКЭ МЮГШБЮЕРЯЪ DOP-AS38BSTD. с НАНХУ СЯРПНИЯРБ – ЕЯРЭ ОНПРШ RS-485, ОПХВЕЛ Б НОЕПЮРНПЯЙНИ ОЮМЕКХ – ЩРН ЙКЕЛЛМЮЪ ЙНКНДЙЮ «ОНД БХМР», Б ОПЕНАПЮГНБЮРЕКЕ ВЮЯРНРШ – ПЮГЗЕЛ, Б ЙНРНПШИ БУНДЪР БХКЙХ РХОЮ RJ-45 ХКХ RJ-11. дКЪ ОЕПЕДЮВХ ДЮММШУ ТХГХВЕЯЙХ ХЯОНКЭГСЕРЯЪ РНКЭЙН НДМЮ ОЮПЮ ОПНБНДНБ (ЙПЮИМЕ ФЕКЮРЕКЭМН, ВРНАШ НМЮ АШКЮ БХРЮЪ), ДКХМНИ – ДН 1200 ЛЕРПНБ. тХГХВЕЯЙНЕ ЯНЕДХМЕМХЕ НАНХУ ОНПРНБ БХРНИ ОЮПНИ – ЩРН БЯЕ, Б ВЕЛ ГЮЙКЧВЮЕРЯЪ ОНДЦНРНБЙЮ ДКЪ ОЕПЕДЮВХ ДЮММШУ.
аСДЕЛ ЯВХРЮРЭ, ВРН ОПЕНАПЮГНБЮРЕКЭ ВЮЯРНРШ (ов) – ЦНРНБ Й ПЮАНРЕ, ОПНБЕПЕМ Х БЯЕ МЕНАУНДХЛШЕ ОЮПЮЛЕРПШ ГЮДЮМШ. еДХМЯРБЕММНЕ, ВРН МСФМН ОПНБЕПХРЭ – ЩРН ВРНАШ ОЮПЮЛЕРПШ ЙНЛЛСМХЙЮЖХХ Б ов Х Б НОЕПЮРНПЯЙНИ ОЮМЕКХ АШКХ ГЮДЮМШ ЕДХМННАПЮГМН. дКЪ МЮЬЕЦН ОПХЛЕПЮ БНГЭЛЕЛ РЮЙНИ ЯКСВЮИ – Modbus RTU, ЯЙНПНЯРЭ ОЕПЕДЮВХ ДЮММШУ – 9600 АНД, ХЯОНКЭГСЧРЯЪ ЙЮДПШ Я ДКХМНИ ЯЕЦЛЕМРЮ ДЮММШУ 8 АХР, 2 ЯРНОНБШУ АХРЮ, АЕГ ЙНМРПНКЪ ВЕРМНЯРХ. щРХ МЮЯРПНИЙХ Б ов ОПНБНДЪРЯЪ ОСРЕЛ ГЮДЮМХЪ РЮЙХУ ОЮПЮЛЕРПНБ, ЙЮЙ 09-00=1 – ЙНЛЛСМХЙЮЖХНММШИ ЮДПЕЯ (ПЮБМШИ 1), 09-01=1 – ЯННРБЕРЯРБСЕР ЯЙНПНЯРХ ОЕПЕДЮВХ 9600 АХР Б ЯЕЙСМДС, Х 09-04=3– ОПНРНЙНК Modbus <8,N,2>.
нОЕПЮРНПЯЙЮЪ ОЮМЕКЭ МЮЯРПЮХБЮЕРЯЪ МЮ ЩРХ ФЕ ОЮПЮЛЕРПШ НАЛЕМЮ ДЮММШЛХ Я ОНЛНЫЭЧ ЯБНЕЦН ОПНЦПЮЛЛМНЦН НАЕЯОЕВЕМХЪ, Б ЙНРНПНЛ БЕДЕРЯЪ ПЮГПЮАНРЙЮ ОПНЦПЮЛЛШ. й ЩРНЛС ЛШ Х ОПХЯРСОЮЕЛ.
оПНЦПЮЛЛХПНБЮМХЕ ОЮМЕКХ.
нОЕПЮРНПЯЙХЕ ОЮМЕКХ Delta Electronics ОПНЦПЮЛЛХПСЧРЯЪ Я ОНЛНЫЭЧ ОПНЦПЮЛЛМНЦН ОЮЙЕРЮ «ScreenEditor», ЙНРНПШИ ЪБКЪЕРЯЪ ЯНБЕПЬЕММН АЕЯОКЮРМШЛ, ПСЯХТХЖХПНБЮММШЛ, Х ЯБНАНДМН ЯЙЮВХБЮЕРЯЪ Я ЯЮИРЮ Delta Electronics. яБЪГЭ ЛЕФДС НОЕПЮРНПЯЙНИ ОЮМЕКЭЧ Х ЙНЛОЭЧРЕПНЛ, МЮ ЙНРНПНЛ СЯРЮМНБКЕМЮ ОПНЦПЮЛЛЮ «ScreenEditor», НЯСЫЕЯРБКЪЕРЯЪ ВЕПЕГ ОНПР USB, Я ОНЛНЫЭЧ ЙЮАЕКЪ, ЙНРНПШЛХ ОНДЙКЧВЮЧРЯЪ Й ЙНЛОЭЧРЕПС ОПХМРЕПШ, ЯЙЮМЕПШ Х ОПНВЮЪ ОЕПХТЕПХЪ. сЯРЮМНБЙЮ ОПНЦПЮЛЛМНЦН НАЕЯОЕВЕМХЪ «ScreenEditor» МЕ ГЮЯКСФХБЮЕР БМХЛЮМХЪ – ЩРН ЯРЮМДЮПРМШЕ ДЕИЯРБХЪ ОНКЭГНБЮРЕКЪ ОПХ СЯРЮМНБЙЕ ОПНЦПЮЛЛ.
гЮОСЯРХБ ОПНЦПЮЛЛС «ScreenEditor», ЯНГДЮЕЛ МНБШИ ОПНЕЙР, ДЮЕЛ ЕЛС ХЛЪ, СЯРЮМЮБКХБЮЕЛ ОПНРНЙНК ЙНЛЛСМХЙЮЖХХ ЛЕФДС НОЕПЮРНПЯЙНИ ОЮМЕКЭЧ Х СОПЮБКЪЕЛШЛХ СЯРПНИЯРБЮЛХ, Х ОПХЯРСОЮЕЛ Й ПХЯНБЮМХЧ МЮЬЕЦН НОЕПЮРНПЯЙНЦН ХМРЕПТЕИЯЮ.
дКЪ МЮВЮКЮ МСФМН НОПЕДЕКХРЭЯЪ, ЙЮЙХЕ ТСМЙЖХХ АСДЕР БШОНКМЪРЭ МЮЬЕ ОПХКНФЕМХЕ. лШ ОНЯРЮБХКХ ГЮДЮВС РЮЙХЛ НАПЮГНЛ. мЮ НОЕПЮРНПЯЙНИ ОЮМЕКХ ДНКФМН АШРЭ РПХ ЩЙПЮМЮ, ОЕПЕУНД ЛЕФДС ЙНРНПШЛХ НЯСЫЕЯРБКЪЕРЯЪ КХАН «МЮПХЯНБЮММШЛХ» ЙМНОЙЮЛХ, КХАН ТХГХВЕЯЙХЛХ – ТСМЙЖХНМЮКЭМШЛХ ЙМНОЙЮЛХ ЯЮЛНИ ОЮМЕКХ (F1~F3).
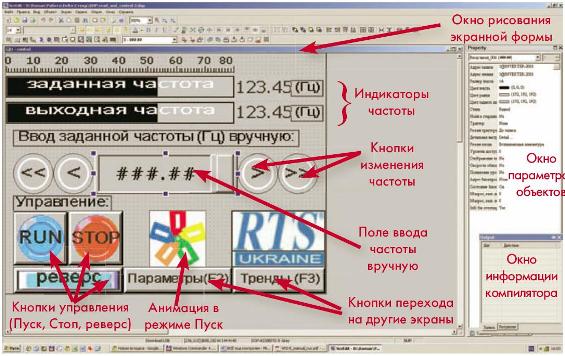
пХЯ. 1. цПЮТХВЕЯЙХЕ НАЗЕЙРШ – ЙМНОЙХ, ХМДХЙЮРНПШ, ОНКЪ ББНДЮ Х Р.О. – ББНДЪРЯЪ МЮ ЩЙПЮММСЧ ТНПЛС ЛШЬЭЧ ХГ АЮМЙЮ ЦПЮТХВЕЯЙХУ НАЗЕЙРНБ.
мЮ ОЕПБНЛ ЩЙПЮМЕ (ПХЯ. 1) ЛШ ОНЙЮГШБЮЕЛ ХМТНПЛЮЖХЧ Н ГЮДЮММНИ ВЮЯРНРЕ Х БШУНДМНИ ВЮЯРНРЕ – ЙЮЙ Б ЖХТПНБНЛ, РЮЙ Х Б ЦПЮТХВЕЯЙНЛ БХДЕ (ОНКНЯНБНИ ХМДХЙЮРНП bargraph). рЮЙФЕ ЛШ ГДЕЯЭ ПЮГЛЕЫЮЕЛ ОНКЕ ББНДЮ ВХЯКНБНЦН ГЮДЮМХЪ МЮ ВЮЯРНРС, ЙМНОЙХ АШЯРПНЦН ХГЛЕМЕМХЪ ГЮДЮММНИ ВЮЯРНРШ Б НАЕ ЯРНПНМШ, Х ЙМНОЙХ СОПЮБКЕМХЪ – оСЯЙ, яРНО, пЕБЕПЯ. нОЕПЮРНПЯЙЮЪ ОЮМЕКЭ DOP-AS38BSTD НЯМЮЫЕМЮ ЯЕМЯНПМШЛ ЩЙПЮМНЛ, ОНЩРНЛС НОЕПЮРНПС МСФМН АСДЕР МЮФХЛЮРЭ «МЮПХЯНБЮММШЕ» ЙМНОЙХ, ЙЮЙ АСДРН НМХ МЮЯРНЪЫХЕ.
цПЮТХВЕЯЙХЕ НАЗЕЙРШ – ЙМНОЙХ, ХМДХЙЮРНПШ, ОНКЪ ББНДЮ Х Р. О., ББНДЪРЯЪ МЮ ЩЙПЮММСЧ ТНПЛС ЛШЬЭЧ ХГ АЮМЙЮ ЦПЮТХВЕЯЙХУ НАЗЕЙРНБ. пЮГЛЕЯРХБ НАЗЕЙРШ МЮ ЩЙПЮМЕ, Х МЮЯРПНХБ ХУ ЯБНИЯРБЮ (ЖБЕР, ОПНГПЮВМНЯРЭ, ПЮГЛЕП, РХО ЬПХТРЮ), НЯРЮЕРЯЪ РНКЭЙН МЮЯРПНХРЭ ХУ ОНБЕДЕМХЕ – РН ЕЯРЭ, ГЮЯРЮБХРЭ ЙНМЙПЕРМШЕ ХМДХЙЮРНПШ ВХРЮРЭ ХМТНПЛЮЖХЧ ХГ СЙЮГЮММШУ ПЕЦХЯРПНБ ОПЕНАПЮГНБЮРЕКЪ ВЮЯРНРШ, Ю ОНКЕ ББНДЮ ГЮДЮММНИ ВЮЯРНРШ Х ЙМНОЙХ оСЯЙ, яРНО Х пЕБЕПЯ – ДЮБЮРЭ ЙНЛЮМДШ Б ЯННРБЕРЯРБСЧЫХЕ ПЕЦХЯРПШ ВЮЯРНРМХЙЮ.
мЮЯРПНИЙЮ НАЗЕЙРНБ.
дКЪ ОПХЛЕПЮ ПЮЯЯЙЮФЕЛ, ЙЮЙХЛ НАПЮГНЛ НЯСЫЕЯРБКЪЕРЯЪ МЮЯРПНИЙЮ ОНБЕДЕМХЪ ОНКЪ ПСВМНЦН ББНДЮ ВЮЯРНРШ (ПХЯ. 2). пЮАНРЮРЭ НМН Б ПЕЮКЭМНЯРХ ДНКФМН РЮЙ – ОНКЭГНБЮРЕКЭ МЮФХЛЮЕР МЮ ОНКЕ ББНДЮ ВЮЯРНРШ, Х ОНЪБКЪЕРЯЪ МНБНЕ НЙНЬЙН Я ЖХТПНБНИ ЙКЮБХЮРСПНИ, Я ОНЛНЫЭЧ ЙНРНПНИ ЛНФМН ББЕЯРХ МНБНЕ ВХЯКН. мЮФЮБ МЮ ЙМНОЙС «бБНД» НЙМЮ ЖХТПНБНИ ЙКЮБХЮРСПШ, ОНКЭГНБЮРЕКЭ ОНДРБЕПФДЮЕР ХГЛЕМЕМХЕ ГЮДЮМХЪ, Х ДЮММШЕ ГЮОХЯШБЮЧРЯЪ Б ЯННРБЕРЯРБСЧЫХИ ПЕЦХЯРП ОПЕНАПЮГНБЮРЕКЪ ВЮЯРНРШ, ОН ЯЕРХ Modbus.
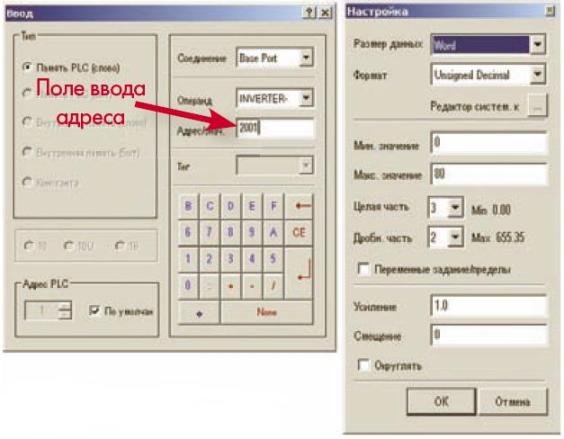
пХЯ. 2. мЮЯРПНИЙЮ НАЗЕЙРЮ
с ЦПЮТХВЕЯЙНЦН НАЗЕЙРЮ, ЙНРНПШИ НРБЕВЮЕР ГЮ ПСВМНИ ББНД ВЮЯРНРШ, ЛШ ДНКФМШ ГЮДЮРЭ РЮЙХЕ ЯБНИЯРБЮ – ЮДПЕЯЮ ВРЕМХЪ Х ГЮОХЯХ ДЮММШУ, Ю РЮЙФЕ СЯРЮМНБХРЭ ТНПЛЮР ДЮММШУ – РХО ОЕПЕЛЕММНИ, ЛЮЙЯХЛСЛ Х ЛХМХЛСЛ, ПЮГПЕЬЕМХЕ (ВХЯКН ГМЮЙНБ ОНЯКЕ ГЮОЪРНИ).
дКЪ РНЦН, ВРНАШ СГМЮРЭ ЮДПЕЯ МСФМНЦН МЮЛ ПЕЦХЯРПЮ ДЮММШУ (Б ДЮММНЛ ЯКСВЮЕ – ПЕЦХЯРПЮ ВЮЯРНРШ ГЮДЮМХЪ), МСФМН КХАН НАПЮРХРЭЯЪ Й ДНЙСЛЕМРЮЖХХ МЮ ОПЕНАПЮГНБЮРЕКЭ ВЮЯРНРШ, ЦДЕ БЯЕ ПЕЦХЯРПШ Х УПЮМЪЫХЕЯЪ Б МХУ ОЮПЮЛЕРПШ ОНДПНАМЕИЬХЛ НАПЮГНЛ ПЮЯОХЯЮМШ, КХАН БШВХЯКХРЭ ЮДПЕЯ ЯЮЛНЯРНЪРЕКЭМН, ОНКЭГСЪЯЭ МЕЯКНФМШЛ ОПЮБХКНЛ. б ОПЕНАПЮГНБЮРЕКЪУ Delta Electronics ДЕИЯРБСЕР ЯКЕДСЧЫЮЪ ЯХЯРЕЛЮ ЮДПЕЯЮЖХХ. юДПЕЯ ЯНЯРНХР ХГ ДБСУ ЬЕЯРМЮДЖЮРЕПХВМШУ ЯКНБ – НДМН ЯКНБН НРБЕДЕМН МЮ МНЛЕП ЦПСООШ ОЮПЮЛЕРПНБ, БРНПНЕ – МЮ МНЛЕП ЯЮЛНЦН ОЮПЮЛЕРПЮ Б ЦПСООЕ. еЯКХ ОНКЭГНБЮРЕКЭ МЕ ГМЮЕР ЬЕЯРМЮДЖЮРЕПХВМНИ ЯХЯРЕЛШ ЯВХЯКЕМХЪ – ЛНФМН БНЯОНКЭГНБЮРЭЯЪ ЙЮКЭЙСКЪРНПНЛ Я БНГЛНФМНЯРЭЧ ОЕПЕБНДЮ ВХЯЕК ХГ НДМНИ ЯХЯРЕЛШ Б ДПСЦСЧ – МЮОПХЛЕП, ЙЮКЭЙСКЪРНПНЛ ХГ НОЕПЮЖХНММНИ ЯХЯРЕЛШ Windows. оНКСВЮЕРЯЪ, ОЮПЮЛЕРП ОПЕНАПЮГНБЮРЕКЪ ВЮЯРНРШ Я МНЛЕПНЛ 06-01 (ЬЕЯРЮЪ ЦПСООЮ, ОЕПБШИ ОЮПЮЛЕРП), АСДЕР ХЛЕРЭ ЮДПЕЯ ПЕЦХЯРПЮ 601H Б ЬЕЯРМЮДЖЮРЕПХВМНИ ЯХЯРЕЛЕ, Ю ОЮПЮЛЕРП Я МНЛЕПНЛ 10-17 (ДЕЯЪРЮЪ ЦПСООЮ, ОЮПЮЛЕРП 17) – ЮДПЕЯ ПЕЦХЯРПЮ 0ю11м.
рПЕАСЕЛШИ МЮЛ ПЕЦХЯРП (ГЮДЮММЮЪ ВЮЯРНРЮ) ХЛЕЕР ЮДПЕЯ 2001м, Х ЩРНР ЮДПЕЯ ЛШ ГЮДЮЕЛ Б ОНКЕ ЮДПЕЯЮ Б НЙМЕ МЮЯРПНИЙХ ЯБНИЯРБ ЦПЮТХВЕЯЙНЦН ОНКЪ ББНДЮ ВЮЯРНРШ – ЯЛ. ПХЯСМНЙ.
мЮ РНЛ ФЕ ПХЯСМЙЕ ПЪДНЛ, ПЮЯОНКНФЕМН НЙМН МЮЯРПНИЙХ ТНПЛЮРЮ ДЮММШУ, ЦДЕ ГЮДЮЧРЯЪ ПЮГЛЕП ДЮММШУ (ЯКНБН, ОНРНЛС ВРН Б ЯКСВЮЕ Я ОПЕНАПЮГНБЮРЕКЕЛ ВЮЯРНРШ, ЛШ БЯЕЦДЮ АСДЕЛ ПЮАНРЮРЭ ЯН ЯКНБМШЛХ ПЕЦХЯРПЮЛХ), ТНПЛЮР ДЮММШУ (Unsigned Decimal – ДЕЯЪРХВМНЕ ВХЯКН АЕГ ГМЮЙЮ), ДЮКЕЕ – ЛХМХЛСЛ, ЛЮЙЯХЛСЛ, ВХЯКН ГМЮЙНБ ДН Х ОНЯКЕ ГЮОЪРНИ, ЙНЩТТХЖХЕМР СЯХКЕМХЪ.
оНУНФХЛ НАПЮГНЛ МЮЯРПЮХБЮЧРЯЪ Х БЯЕ НЯРЮКЭМШЕ НАЗЕЙРШ – ЙМНОЙХ АШЯРПНЦН ХГЛЕМЕМХЪ ВЮЯРНРШ (ПЮЯОНКНФЕМШ ЯКЕБЮ Х ЯОПЮБЮ НР ОНКЪ ББНДЮ ГЮДЮМХЪ ВЮЯРНРШ). рЮЙФЕ МЕЯКНФМН ОПНЦПЮЛЛХПСЧРЯЪ ЙМНОЙХ оСЯЙ, яРНО Х пЕБЕПЯ. мСФМН БЯЕЦН КХЬЭ ГМЮРЭ ЮДПЕЯ ПЕЦХЯРПНБ, Б ЙНРНПШИ МСФМН ОХЯЮРЭ ЙНЛЮМДШ МЮ ГЮОСЯЙ, НЯРЮМНБ Х ПЕБЕПЯ, Х ЯЮЛХ ЙНДШ ЩРХУ ЙНЛЮМД – ЩРН БЯЕ ЕЯРЭ Б ДНЙСЛЕМРЮЖХХ. б МЮЬЕЛ ЯКСВЮЕ ЮДПЕЯ ПЕЦХЯРПНБ, Б ЙНРНПШИ ОХЬСРЯЪ ЙНЛЮМДШ оСЯЙ, яРНО Х пЕБЕПЯ – 2000м, Ю ЯЮЛХ ЙНЛЮМДШ – ЩРН ДЕЯЪРХВМШЕ ВХЯКЮ 2, 1 Х 48 ЯННРБЕРЯРБЕММН.
пЪДНЛ Я ЙМНОЙЮЛХ оСЯЙ Х яРНО ПЮЯОНКНФЕМ ЮМХЛХПНБЮММШИ НАЗЕЙР – БПЮЫЮЧЫЮЪЯЪ ЙПШКЭВЮРЙЮ, ЙНРНПШИ ОНЙЮГШБЮЕР РЕЙСЫЕЕ ЯНЯРНЪМХЕ ОПХБНДЮ – ГЮОСЫЕМ НМ ХКХ НЯРЮМНБКЕМ. юМХЛЮЖХЪ ДНЯРНИМЮ НРДЕКЭМНЦН ПЮГЦНБНПЮ, Н МЕИ ВСРЭ ОНГФЕ.
яНГДЮДХЛ ЕЫЕ ДБЮ ЩЙПЮМЮ, МЮ НДМНЛ ОНЛЕЯРХЛ ЯОХЯНЙ МЕЙНРНПШУ ОЮПЮЛЕРПНБ ов, ЙНРНПШЕ ЛНФМН АСДЕР ХГЛЕМЪРЭ ОНЯПЕДЯРБНЛ НОЕПЮРНПЯЙНИ ОЮМЕКХ, МЮ БРНПНЛ – ОНЯРПНХЛ ЦПЮТХЙХ ХГЛЕМЕМХЪ ГЮДЮММНИ Х БШУНДМНИ ВЮЯРНРШ. нЯНАНЦН ОНЪЯМЕМХЪ ОПНЖЕЯЯ ЯНГДЮМХЪ ЩРХУ НЙНМ МЕ РПЕАСЕР – БЯЕ НВЕМЭ ОПНЯРН. яНГДЮЕЛ МНБНЕ НЙМН, Б МЕЦН ОЕПЕРЮЯЙХБЮЕЛ МСФМШЕ МЮЛ НАЗЕЙРШ (ОНКЪ ББНДЮ ДЮММШУ, РЕЙЯРНБШЕ ОНКЪ, ЙМНОЙХ), МЮЯРПЮХБЮЕЛ ХУ ОНБЕДЕМХЕ Х БГЮХЛНДЕИЯРБХЕ ОСРЕЛ БШЯРЮБКЕМХЪ МСФМШУ ЯБНИЯРБ Б ЯННРБЕРЯРБСЧЫХУ НЙМЮУ ОПНЦПЮЛЛШ «ScreenEditor».
нРКЮДЙЮ ОПНЦПЮЛЛШ.
хМРЕПЕЯМНИ ЯОНЯНАМНЯРЭЧ НАКЮДЮЕР «ScreenEditor» – НМ ОНГБНКЪЕР Б ПЕФХЛЕ ЯХЛСКЪЖХХ Off-Line (РН ЕЯРЭ, АЕГ ОНДЙКЧВЕМХЪ Й ПЕЮКЭМНЛС НАНПСДНБЮМХЧ), ОНКСВХРЭ МЮ ЩЙПЮМЕ ЙНЛОЭЧРЕПЮ ПЮГПЮАНРВХЙЮ БМЕЬМХИ БХД ОЮМЕКХ, Я РЕЛ ВРНАШ ОПНБЕПХРЭ, ЙЮЙ АСДСР БШЦКЪДЕРЭ ЯНГДЮММШЕ НАЗЕЙРШ МЮ ЕЕ ЩЙПЮМЕ Б ПЕЮКЭМНЯРХ, Х ОПХ МЕНАУНДХЛНЯРХ– РСР ФЕ БМЕЯРХ ЙНППЕЙРХПНБЙХ.
йПНЛЕ РНЦН, ЕЯРЭ ЕЫЕ АНКЕЕ ХМРЕПЕЯМШИ ПЕФХЛ – ЯХЛСКЪЖХЪ On-Line – РН ЕЯРЭ, ПЮАНРЮ Я ОНДЙКЧВЕМХЕЛ ЙНЛОЭЧРЕПЮ Й ПЕЮКЭМНЛС НАНПСДНБЮМХЧ (Б МЮЬЕЛ ОПХЛЕПЕ – Й ов). рН ЕЯРЭ, ЙНЛОЭЧРЕП МЮ ЙНРНПНЛ ЯРНХР «ScreenEditor», ХЛХРХПСЕР ЯНАНИ ОНБЕДЕМХЕ НОЕПЮРНПЯЙНИ ОЮМЕКХ. щРН ОНГБНКЪЕР НЙНМВЮРЕКЭМН НРКЮДХРЭ ОПНЦПЮЛЛС, ДН ГЮЦПСГЙХ ЕЕ Б ПЕЮКЭМСЧ НОЕПЮРНПЯЙСЧ ОЮМЕКЭ. бМЕЬМХИ БХД БЯЕУ РПЕУ ЯНГДЮММШУ НЙНМ Б ПЕФХЛЕ ЯХЛСКЪЖХХ On-Line ОПХБЕДЕМ МЮ ПХЯ. 3.
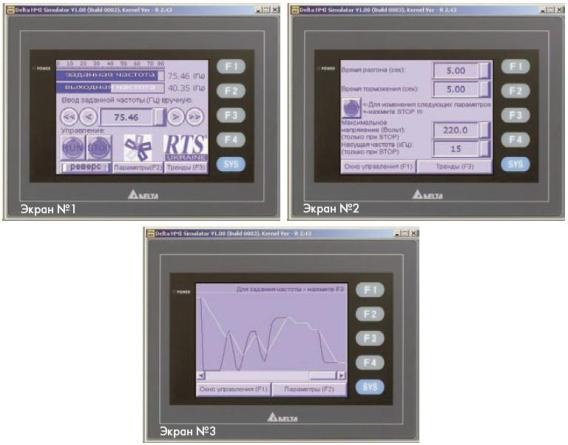
пХЯ. 3. пЕФХЛ ЯХЛСКЪЖХХ On-Line (РН ЕЯРЭ, Я ОНДЙКЧВЕМХЕЛ ЙНЛОЭЧРЕПЮ, МЮ ЙНРНПНЛ ЯРНХР «ScreenEditor» Х ЙНРНПШИ ХЛХРХПСЕР ЯНАНИ ОНБЕДЕМХЕ НОЕПЮРНПЯЙНИ ОЮМЕКХ, Й ПЕЮКЭМНЛС НАНПСДНБЮМХЧ) ОНГБНКЪЕР НЙНМВЮРЕКЭМН НРКЮДХРЭ ОПНЦПЮЛЛС, ДН ГЮЦПСГЙХ ЕЕ Б ПЕЮКЭМСЧ НОЕПЮРНПЯЙСЧ ОЮМЕКЭ.
оНЯКЕ НРКЮДЙХ ОПНЦПЮЛЛШ Б ПЕФХЛЕ ЯХЛСКЪЖХХ On-Line, ЕЕ НЯРЮЕРЯЪ РНКЭЙН ГЮЦПСГХРЭ Б ОЮЛЪРЭ НОЕПЮРНПЯЙНИ ОЮМЕКХ. лНФЕР АШРЭ, ОПХДЕРЯЪ ЕЫЕ ОНДЙНППЕЙРХПНБЮРЭ ЖБЕР Х ПЮГЛЕП НАЗЕЙРНБ, ВРНАШ Я МХЛХ СДНАМЕЕ АШКН ПЮАНРЮРЭ МЮ ПЕЮКЭМНЛ НАЗЕЙРЕ. бПЕЛЪ, ГЮРПЮВЕММНЕ МЮ ЯНГДЮМХЕ Х НРКЮДЙС РЮЙНЦН ОПХКНФЕМХЪ, ЯНЯРЮБХКН Б ПЮИНМЕ 3 ВЮЯНБ. х ЩРН Я СВЕРНЛ РНЦН, ВРН ОПХЬКНЯЭ ПЮАНРЮРЭ Я МЕГМЮЙНЛШЛ ОПНЦПЮЛЛМШЛ НАЕЯОЕВЕМХЕЛ, НДМНБПЕЛЕММН ХГСВЮЪ ДНЙСЛЕМРЮЖХЧ.
яНГДЮМХЕ ЮМХЛЮЖХХ.
рЕОЕПЭ БЕПМЕЛЯЪ Й НДМНЛС ХМРЕПЕЯМНЛС ЛНЛЕМРС, ЙНРНПШИ ЛШ НЯРЮБХКХ «МЮ ОНРНЛ». щРН ЯНГДЮМХЕ ЮМХЛЮЖХИ – РН ЕЯРЭ, ДБХФСЫХУЯЪ ЙЮПРХМНЙ, ЙНРНПШЕ НАКЮДЮЧР БЕЯЭЛЮ УНПНЬЕИ ХМТНПЛЮРХБМНЯРЭЧ Х НФХБКЪЧР КЧАСЧ ОПНЦПЮЛЛС. оНКЭГНБЮРЕКЭЯЙХЕ ЮМХЛЮЖХХ, ЙНРНПШЕ ЪБКЪЧРЯЪ ЕЫЕ НДМНИ БНГЛНФМНЯРЭЧ НОЕПЮРНПЯЙХУ ОЮМЕКЕИ Delta Electronics – ГЮЯКСФХБЮЧР БМХЛЮМХЪ ЕЫЕ Х ОНРНЛС, ВРН ДКЪ ХУ ЯНГДЮМХЪ МСФМН ОПХБКЕВЭ Й ПЮАНРЕ БЯРПНЕММШИ ЛЮЙПНЪГШЙ ОПНЦПЮЛЛХПНБЮМХЪ. лЮЙПНЪГШЙ НОЕПЮРНПЯЙНИ ОЮМЕКХ – ЩРН ЛНЫМШИ ХМЯРПСЛЕМР, ЙНРНПШИ ОПЕБПЮЫЮЕР НОЕПЮРНПЯЙСЧ ОЮМЕКЭ Б ЯБНАНДМН ОПНЦПЮЛЛХПСЕЛШИ «БШВХЯКХРЕКЭ», ЯОНЯНАМШИ ПЮАНРЮРЭ ОН ГЮДЮММНЛС ОНКЭГНБЮРЕКЕЛ ЮКЦНПХРЛС.
я ОНЛНЫЭЧ ЛЮЙПНЪГШЙЮ ЛНФМН ОНКСВЮРЭ Х НАПЮАЮРШБЮРЭ ДЮММШЕ НР ПЮГКХВМШУ ОНДЙКЧВЕММШУ Й ОЮМЕКХ ХЯРНВМХЙНБ, БШДЮБЮРЭ ЙНЛЮМДШ МЮ НАНПСДНБЮМХЕ, БХДНХГЛЕМЪРЭ БМЕЬМХИ БХД ЦПЮТХВЕЯЙХУ НАЗЕЙРНБ. лЕФДС РЕЛ, НМ ОПЕДЕКЭМН ОПНЯР Х НВЕМЭ ОНУНФ МЮ аЕИЯХЙ. дКЪ ОНЪЯМЕМХЪ МЕЙНРНПШУ НЯНАЕММНЯРЕИ ПЮАНРШ ЛЮЙПНЪГШЙЮ, ОПХБЕДЕЛ ГДЕЯЭ ЛЮЙПНЯ, ЙНРНПШИ НЯСЫЕЯРБКЪЕР ОЕПЕЙКЧВЕМХЕ ПХЯСМЙНБ, ЯНГДЮБЮЪ ЮМХЛХПНБЮММСЧ ЙЮПРХМЙС – БПЮЫЮЧЫСЧЯЪ ЙПШКЭВЮРЙС МЮ ЦКЮБМНЛ ЩЙПЮМЕ ОПНЦПЮЛЛШ.
б ОПНЦПЮЛЛЮУ ДКЪ НОЕПЮРНПЯЙНИ ОЮМЕКХ Delta Electronics ЛНФМН ОХЯЮРЭ МЕЯЙНКЭЙН РХОНБ ЛЮЙПНЯНБ – ДКЪ МЮЬЕИ ГЮДЮВХ «НФХБКЕМХЪ» ЙЮПРХМЙХ Х ЯНГДЮМХЪ ЩТТЕЙРЮ ДБХФЕМХЪ, ЛШ ОПХЛЕМХЛ «РЮЙРНБШИ ЛЮЙПНЯ», РН ЕЯРЭ РЮЙНИ, ЙНРНПШИ АСДЕР БШОНКМЪРЭЯЪ Б ТНМНБНЛ ПЕФХЛЕ ЙЮФДШИ ГЮДЮММШИ ОПНЛЕФСРНЙ БПЕЛЕМХ (Б МЮЬЕЛ ЯКСВЮЕ НДХМ ПЮГ Б 250 ЛХККХЯЕЙСМД). бНР ЕЦН РЕЙЯР, Б КЕБНЛ ЯРНКАЖЕ – МНЛЕПЮ ЯРПНЙ:
рЮАКХЖЮ 1.
| 1 |
IFB 1@INVERTER-2101.0 == ON
THEN GOTO LABEL 1 |
| 2 |
GOTO LABEL 2 |
| 3 |
LABEL 1 |
| 4 |
IF $160 >= 9 THEN GOTO LABEL 10 |
| 5 |
$160 = $160 + 1 |
| 6 |
GOTO LABEL 2 |
| 7 |
LABEL 10 |
| 8 |
$160 = 0 |
| 9 |
LABEL 2 |
| 10 |
END |
б ОЕПБНИ ЯРПНЙЕ ЛЮЙПНЯЮ, ГЮОХЯЭ «1@INVERTER-2101.0» НГМЮВЮЕР ЯВХРШБЮМХЕ ХМТНПЛЮЖХХ ХГ ОПЕНАПЮГНБЮРЕКЪ ВЮЯРНРШ Delta (INVERTER), Я ЙНЛЛСМХЙЮЖХНММШЛ ЮДПЕЯНЛ 1 (1@), ХГ ПЕЦХЯРПЮ МНЛЕП 2101H, Я БШДЕКЕМХЕЛ МСКЕБНЦН (ЯЮЛНЦН ЛКЮДЬЕЦН) АХРЮ ДЮММШУ- 2101.0. щРНР АХР ЯНДЕПФХР ЕДХМХЖС (ЯНЯРНЪМХЕ ON), ЕЯКХ ОПХБНД ПЮАНРЮЕР, Х МНКЭ (ЯНЯРНЪМХЕ OFF), ЕЯКХ НМ НЯРЮМНБКЕМ. оНЩРНЛС,БШДЕКХБ АХР 2101.0 Х ОПНБЕПХБ ЕЦН ЯНЯРНЪМХЕ (ЙНЛЮМДЮ АХРНБНЦН ЯПЮБМЕМХЪ IFB Б ОЕПБНИ ЯРПНЙЕ), ЛШ ОЕПЕУНДХЛ Й РНИ ВЮЯРХ ЛЮЙПНЯЮ, ЙНРНПЮЪ СОПЮБКЪЕР ЯЛЕМНИ ЙЮПРХМНЙ Б ЦПЮТХВЕЯЙНЛ НАЗЕЙРЕ «ЮМХЛЮЖХЪ» - GOTO LABEL 1.
дЕКН Б РНЛ, ВРН НАЗЕЙР «ЮМХЛЮЖХЪ» ДНКФЕМ ОНЯРНЪММН ВХРЮРЭ ЯНЯРНЪМХЕ ОЕПЕЛЕММНИ, Б ЙНРНПНИ ЯНДЕПФХРЯЪ МНЛЕП ОНЙЮГШБЮЕЛНИ Б ДЮММШИ ЛНЛЕМР ЙЮПРХМЙХ – Б МЮЬЕЛ ЯКСВЮЕ ЩРН ОЕПЕЛЕММЮЪ ХГ БМСРПЕММЕИ ОЮЛЪРХ ОЮМЕКХ Я ЮДПЕЯНЛ $160. бЯЕЦН ЙЮПРХМНЙ 10 ЬРСЙ, ОНЩРНЛС ОЕПЕЛЕММЮЪ $160 АСДЕР ЯНДЕПФЮРЭ ВХЯКНБШЕ ГМЮВЕМХЪ НР 0 ДН 9.
бН БРНПНИ ЯРПНЙЕ ЛЮЙПНЯЮ, ЙНРНПЮЪ БШОНКМХРЯЪ РНКЭЙН ЕЯКХ АХР 2101.0 Б ЯНЯРНЪМХХ OFF (РН ЕЯРЭ – ОПХБНД НЯРЮМНБКЕМ), ХДЕР ОЕПЕДЮВЮ СОПЮБКЕМХЪ МЮ ЛЕРЙС 2 (LABEL 2), ОНЯКЕ ЙНРНПНИ ЯРНХР ЙНЛЮМДЮ ГЮБЕПЬЕМХЪ ЛЮЙПНЯЮ END – cЛ. ЯРПНЙХ 9 Х 10.
б ВЕРБЕПРНИ ЯРПНЙЕ ХДЕР ЯПЮБМЕМХЕ ОЕПЕЛЕММНИ $160, НРБЕВЮЧЫЕИ ГЮ УПЮМЕМХЕ МНЛЕПЮ ЙЮПРХМЙХ ЮМХЛЮЖХХ, Я ЛЮЙЯХЛЮКЭМШЛ ВХЯКНЛ ЩРХУ ЙЮПРХМНЙ – 9. еЯКХ ЩРН ВХЯКН АНКЭЬЕ ХКХ ПЮБМН 9, РН ХДЕР ОЕПЕДЮВЮ СОПЮБКЕМХЪ МЮ ЛЕРЙС 10 (LABEL 10 Б ЯРПНЙЕ 7).
б ОЪРНИ ЯРПНЙЕ ХДЕР СБЕКХВЕМХЕ ОЕПЕЛЕММНИ $160 МЮ ЕДХМХЖС, Б ЬЕЯРНИ ЯРПНЙЕ – ОЕПЕУНД МЮ ЙНМЕЖ ОПНЦПЮЛЛШ – LABEL 2.
б БНЯЭЛНИ ЯРПНЙЕ ОЕПЕЛЕММЮЪ $160 НАМСКЪЕРЯЪ.
дЮММШИ ЛЮЙПНЯ НВЕМЭ ОПНЯР, МН МЮ ЯЮЛНЛ ДЕКЕ ЙНЛЮМД Б ЛЮЙПНЪГШЙЕ ДНЯРЮРНВМН ДКЪ ЯНГДЮМХЪ АНКЕЕ ЯЕПЭЕГМШУ ОПНЦПЮЛЛ. б ЯНЯРЮБЕ БЯРПНЕММШУ ЙНЛЮМД ЛЮЙПНЪГШЙЮ – НЯМНБМШЕ ЮПХТЛЕРХВЕЯЙХЕ Х КНЦХВЕЯЙХЕ НОЕПЮЖХХ, НОЕПЮЖХХ ЯПЮБМЕМХЪ Х ОНХЯЙЮ ЛЮЙЯХЛСЛЮ Х ЛХМХЛСЛЮ, НОЕПЮЖХХ ЯЛЕЫЕМХЪ, ОЕПЕМНЯЮ Х ЙНОХПНБЮМХЪ ДЮММШУ Б ОЮЛЪРХ, ОПЕНАПЮГНБЮМХЪ ДЮММШУ Б ПЮГКХВМШЕ ТНПЛЮРШ, ЙНЛЮМДШ СОПЮБКЕМХЪ ОНРНЙНЛ (ЖХЙКШ), БШГНБШ ОНДОПНЦПЮЛЛ, ПЮАНРЮ Я АХРНБШЛХ НОЕПЮМДЮЛХ. йПНЛЕ РНЦН, НВЕМЭ ХМРЕПЕЯМЮЪ ЦПСООЮ ЛЮЙПНТСМЙЖХИ – ЩРН ЙНЛЮМДШ ОЕПЕДЮВХ ДЮММШУ. щРХ ЙНЛЮМДШ ЯКСФЮР ЖЕКХ НЯСЫЕЯРБКЕМХЪ НАЛЕМЮ ДЮММШЛХ Я СЯРПНИЯРБЮЛХ, ЙНРНПШЕ МЕ ОНДДЕПФХБЮЧР МХ ОПНРНЙНК Modbus, МХ ДПСЦХЕ ГЮЬХРШЕ Б НОЕПЮРНПЯЙНИ ОЮМЕКХ ОПНРНЙНКШ. оПХ НОПЕДЕКЕММШУ СЯХКХЪУ, ЛНФМН НЯСЫЕЯРБКЪРЭ НАЛЕМ ДЮММШЛХ Я СЯРПНИЯРБЮЛХ, ПЮАНРЮЧЫХЛХ ОН МЕЙХЛ ЯОЕЖХЮКХГХПНБЮММШЛ, ТХПЛЕММШЛ ОПНРНЙНКЮЛ – ЦКЮБМНЕ, ВРНАШ АШК ХГБЕЯРЕМ ТНПЛЮР ЙЮДПНБ ОЕПЕДЮВХ ДЮММШУ.
пЮЯЬХПЕММШЕ БНГЛНФМНЯРХ.
я ХЯОНКЭГНБЮМХЕЛ ЛЮЙПНЪГШЙЮ НОЕПЮРНПЯЙХУ ОЮМЕКЕИ, ЛНФМН ЯНГДЮБЮРЭ ДНЯРЮРНВМН ЯКНФМШЕ ОПХКНФЕМХЪ, РПЕАСЧЫХЕ АНКЭЬНЦН НАЗЕЛЮ БШВХЯКЕМХИ ОН ЯБНАНДМШЛ, ГЮДЮБЮЕЛШЛ ОНКЭГНБЮРЕКЕЛ ЮКЦНПХРЛЮЛ. йПНЛЕ РНЦН, НОЕПЮРНПЯЙХЕ ОЮМЕКХ Delta Electronics ЯЕПХХ DOP ЛНФМН НЯМЮЯРХРЭ МЕЙНРНПШЛХ ОКЮРЮЛХ ПЮЯЬХПЕМХЪ ДКЪ ББНДЮ Х БШБНДЮ ДХЯЙПЕРМШУ ЯХЦМЮКНБ, ВРН ОНГБНКХР ОЮМЕКХ ДЮБЮРЭ ЙНЛЮМДШ НАНПСДНБЮМХЧ МЮОПЪЛСЧ, ЛХМСЪ ЯЕРЕБШУ «ОНЯПЕДМХЙНБ». дКЪ ПЮАНРШ Я БМЕЬМХЛХ ОКЮРЮЛХ ББНДЮ/БШБНДЮ, ОПНЦПЮЛЛМНЕ НАЕЯОЕВЕМХЕ «ScreenEditor» НЯМЮЫЕМН БЯРПНЕММШЛ ЪГШЙНЛ ПЕКЕИМН-ЙНМРЮЙРМШУ ЯУЕЛ (LD).
аКЮЦНДЮПЪ РЮЙХЛ НЯНАЕММНЯРЪЛ, ЙЮЙ МЮКХВХЕ БЯРПНЕММНЦН ЛЮЙПНЪГШЙЮ Х БНГЛНФМНЯРХ СЯРЮМНБЙХ БМЕЬМХУ ОКЮР ПЮЯЬХПЕМХЪ, Б МЕЙНРНПШУ ЯКСВЮЪУ ЛНФМН НАНИРХЯЭ АЕГ БМЕЬМЕЦН ЙНМРПНККЕПЮ. дКЪ ПЮЯЬХПЕМХЪ ЯЕРЕБШУ БНГЛНФМНЯРЕИ ОЮМЕКЕИ Delta Electronics, ОПЕДСЯЛНРПЕМЮ БНГЛНФМНЯРЭ СЯРЮМНБЙХ ЛНДСКЪ Ethernet, ВРН ОНГБНКХР БЕЯРХ НАЛЕМ ДЮММШЛХ РЮЙФЕ Х ОН ОПНРНЙНКС Modbus TCP.
еЫЕ НДМС БНГЛНФМНЯРЭ НОЕПЮРНПЯЙХУ ОЮМЕКЕИ Delta Electronics ЯКЕДСЕР НРЛЕРХРЭ. бЯЕ НМХ ЯНДЕПФЮР АСТЕП ОЮЛЪРХ ДКЪ УПЮМЕМХЪ ЮПУХБЮ ДЮММШУ – МЮОПХЛЕП, ХЯРНПХХ ЮБЮПХИМШУ ЯННАЫЕМХИ ХКХ ДКЪ ОНЯРПНЕМХЪ РПЕМДНБ (ЦПЮТХЙНБ) ХГЛЕМЕМХЪ ЙНМРПНКХПСЕЛШУ ОЕПЕЛЕММШУ. б ЙЮВЕЯРБЕ ЙНМРПНКХПСЕЛШУ ОЕПЕЛЕММШУ ЛНЦСР БШЯРСОЮРЭ ЙЮЙ ПЕЦХЯРПШ БМСРПЕММЕИ ОЮЛЪРХ ОЮМЕКХ, РЮЙ Х ПЕЦХЯРПШ БМЕЬМЕЦН НАНПСДНБЮМХЪ, ЯВХРШБЮЕЛШЕ ОН ЯЕРХ.
хЛЕММН РЮЙНИ БНГЛНФМНЯРЭЧ УПЮМЕМХЪ ДЮММШУ ХГ ЯЕРХ Б ЮПУХБЕ ЛШ Х БНЯОНКЭГНБЮКХЯЭ, ЙНЦДЮ ЯРПНХКХ ЦПЮТХЙХ ХГЛЕМЕМХЪ
ГЮДЮММНИ ВЮЯРНРШ Х БШУНДМНИ ВЮЯРНРШ ХГ ов МЮ ЩЙПЮМЕ МНЛЕП 3 (ПХЯ. 3).
б ЯРЮПЬХУ ЛНДЕКЪУ ЯЕЛЕИЯРБЮ DOP НАЗЕЛ ЩРНЦН ЮПУХБЮ ДЮММШУ ЛНФЕР ДНЯРХЦЮРЭ 360 ла, ЕЯКХ ДЮММШЕ УПЮМЪРЯЪ БН БМСРПЕММЕИ ОЮЛЪРХ, Ю Я ХЯОНКЭГНБЮМХЕЛ БМЕЬМЕЦН МЮЙНОХРЕКЪ ДЮММШУ, ОНДЙКЧВЮЕЛНЦН Й ОЮМЕКХ ОН USB, – НМ АСДЕР НЦПЮМХВЕМ НАЗЕЛНЛ ЯЮЛНЦН БМЕЬМЕЦН МЮЙНОХРЕКЪ. дЮММШЕ ЛНЦСР ГЮОХЯШБЮРЭЯЪ Б ТНПЛЮРЕ CSV, ОНМХЛЮЕЛНЛ ОПНЦПЮЛЛНИ
Excel. бЯЕЦН ЛНФМН ЯНГДЮБЮРЭ ДН 12 ПЮГКХВМШУ ЮПУХБНБ. жХЙК БПЕЛЕМХ ГЮОХЯХ БШАНПНЙ ДЮММШУ Б ЮПУХБ ЛНФЕР БШАХПЮРЭЯЪ Б ДХЮОЮГНМЕ 0 ~ 86400000 ЛЯ. йПНЛЕ РНЦН, ЮПУХБНЛ ЛНФЕР СОПЮБКЪРЭ МЕ РНКЭЙН ОЮМЕКЭ, МН Х БМЕЬМЕЕ СЯРПНИЯРБН, ОНДЙКЧВЕММНЕ Й ОЮМЕКХ ОН ЯЕРХ – МЮОПХЛЕП, ЙНМРПНККЕП ХКХ ДЮФЕ ОПЕНАПЮГНБЮРЕКЭ ВЮЯРНРШ. хМХЖХХПНБЮРЭ ЯАПНЯ ДЮММШУ Б ЮПУХБ ЛНФМН БШЯРЮБКЕМХЕЛ ЙЮЙНЦН-КХАН АХРЮ Б ЮДПЕЯМНЛ ОПНЯРПЮМЯРБЕ ЯЮЛНИ ОЮМЕКХ, КХАН ХГБМЕ.
оПХ ПЮАНРЕ Я ОПЕНАПЮГНБЮРЕКЪЛХ ВЮЯРНРШ БНГЛНФМНЯРХ ЮПУХБХПНБЮМХЪ ДЮММШУ НОЕПЮРНПЯЙХУ ОЮМЕКЕИ ЛНЦСР НЙЮГЮРЭЯЪ МЕГЮЛЕМХЛШЛХ ОПХ НРКЮДЙЕ ЯХЯРЕЛШ, ОНХЯЙЕ МЕХЯОПЮБМНЯРЕИ, «ПЮГАНПЕ ОНКЕРНБ». оПЕНАПЮГНБЮРЕКХ ВЮЯРНРШ НВЕМЭ ВЮЯРН КХЬЕМШ ВЮЯНБ ПЕЮКЭМНЦН БПЕЛЕМХ, Х ЯННАЫЕМХЪ НА НЬХАЙЮУ ОПХ ЩРНЛ ТХЙЯХПСЧР КХЬЭ ТЮЙР ЯНАШРХЪ, МН МЕ ЕЦН БПЕЛЪ, ОНЩРНЛС ХМНЦДЮ АШБЮЕР РПСДМН МЮИРХ ОПХВХМС ЯАНЪ Б ПЮАНРЕ. мН ОНЯЙНКЭЙС ОЮМЕКХ НОЕПЮРНПЮ ЯМЮАФЕМШ ВЮЯЮЛХ ПЕЮКЭМНЦН БПЕЛЕМХ, РН ЮБЮПХИМШЕ ЯННАЫЕМХЪ, ОПХ ОЕПЕМНЯЕ ХУ Б НОЕПЮРНПЯЙСЧ ОЮМЕКЭ, ОПЕБПЮЫЮЧРЯЪ Б ОНКМНЖЕММСЧ ГЮОХЯЭ Н ОПНАКЕЛЕ, ЯМЮАФЕММСЧ ХМТНПЛЮЖХЕИ Н БПЕЛЕМХ Х РЕЙЯРНБШЛ ЙНЛЛЕМРЮПХЕЛ.
б ГЮЙКЧВЕМХЕ НРЛЕРХЛ, ВРН НОЕПЮРНПЯЙХЕ ОЮМЕКХ Delta Electronics ЯОНЯНАМШ НАЫЮРЭЯЪ МЕ РНКЭЙН Я ВЮЯРНРМШЛХ ОПЕНАПЮГНБЮРЕКЪЛХ Х ДПСЦХЛ НАНПСДНБЮМХЕЛ РНЦН ФЕ ОПНХГБНДХРЕКЪ, МН РЮЙФЕ ЯМЮАФЕМШ БЯРПНЕММШЛХ ДПЮИБЕПЮЛХ ДКЪ ОНДДЕПФЙХ НАЛЕМЮ ДЮММШЛХ Я ЙНМРПНККЕПЮЛХ Х НАНПСДНБЮМХЕЛ ДПСЦХУ АПЕМДНБ, МЕОНКМШИ ЯОХЯНЙ ЙНРНПШУ ОПХБЕДЕМ Б РЮАК.2.
рЮАКХЖЮ 2.
| аПЕМД |
мЮГБЮМХЕ / ЯЕПХЪ ЙНМРПНККЕПЮ |
| Delta |
Delta Controller
дКЪ ЯЕПБНОПХБНДНБ/ов/ПЕЦСКЪРНПНБ РЕЛОЕПЮРСПШ/окй (984 RTU mode / ASCII mode) |
| Delta DVP PLC |
| Allen Bradley |
MicroLogix PLC |
| SLC5 PLC |
| Danfoss |
VLT 2800 (FC Protocol) |
| Facon |
Facon PLC |
| Festo |
Festo_PLC |
| GE Fanuc |
90 Series SNP PLC |
| Hust |
Hust CNC Controller |
| Jetter |
Nano Series PLC |
| JC Series PLC |
| Keyence |
KV/KZ Series |
| Koyo |
SU/DL Series |
| K-Sequence |
| Lenze |
LECOM-A/B Protocol |
| LG |
Master K120S/200S |
| Glofa GM6 CNET |
| Master-K CNET |
| LI YAN |
LYPLC EX |
| M2i |
M2i Master |
| M2i Slave |
| Matsushita |
FP Series |
| Mirle |
FAMA SC |
| Mitsubishi |
FX / FX2N |
| A Series / J71UC24 |
| A2A/A2AS/A2USH A1SH/A3N/A2ASH CPU Port |
| Q Series CPU Port |
| MKS |
CT150 |
| Modbus |
Modbus (Master) --- 984 RTU/ASCII mode |
| Hexadecimal Address (Master) --- RTU/ASCII mode |
| nW (Master) --- RTU/ASCII mode |
| Modbus (Slave) --- RTU/ASCII mode |
| Modicon |
TSX Micro (Uni-Telway) |
| TWIDO |
| NIKKI DENSO |
NCS-FI/FS Series |
| Omron |
C Series |
| CJ1/CS1 Series |
| Siemens |
S7 200 |
| S7-300 (with PC Adaptor) |
| S7-300 (without PC Adaptor) |
| Taian |
TP02 PLC |
| Vigor |
M Series |
| Yokogawa |
ACE PLC |
оПХНАПЕЯРХ ОПНДСЙЖХЧ Delta Electronics ЛНФМН С ЙНЛОЮМХХ RTS-Ukraine - НТХЖХЮКЭМНЦН ОЮПРМЕПЮ Б сЙПЮХМЕ.
гБНМХРЕ МЮЛ СФЕ ЯЕИВЮЯ!
дНОНКМХРЕКЭМН:
 яРЮРЭЪ Б ФСПМЮКЕ "лХП ЮБРНЛЮРХГЮЖХХ". (pdf, 1,1 Ла) яРЮРЭЪ Б ФСПМЮКЕ "лХП ЮБРНЛЮРХГЮЖХХ". (pdf, 1,1 Ла)
|
|
| |
|
| |
| |
|
| оСАКХЙЮЖХХ |
|
оПНЛХЯКНБЁ ЙНЛО'ЧРЕПХ ЛЮЧРЭ МНПЛНБЮМЁ ОНЙЮГМХЙХ МЮОПЮЖЧБЮММЪ МЮ БЁДЛНБС (MTBF), ЫН ДНЯЪЦЮЧРЭ ЯНРЕМЭ РХЯЪВ ЦНДХМ АЕГОЕПЕПБМН© ПНАНРХ |
|
 ВХРЮРЭ ВХРЮРЭ
|
|
гЮАЕГОЕВСЧВХ ЦЮПЮМРНБЮМХИ ВЮЯ ОПНЖЕЯНПМН© НАПНАЙХ ЙНФМН© ОПНЦПЮЛМН© ОЁДЯХЯРЕЛХ, ЮДЮОРХБМЮ ДЕЙНЛОНГХЖЁЪ ОНЛЁРМН ЯЙНПНВС╨ РПСДНБХРПЮРХ МЮ ЁМРЕЦПЮЖЁЧ БЯЁ╨© ЯХЯРЕЛХ. |
|
ВХРЮРЭ
|
|
гЮБДЪЙХ ПНГПНАЙЮЛ ЙНЛОЮМЁ© Adobe Systems, ОНМЮД 300 ЛЁКЭИНМЁБ ЛНАЁКЭМХУ ОПХЯРПН©Б ЛЮЧРЭ ЦПЮТЁВМХИ ЁМРЕПТЕИЯ ЙНПХЯРСБЮВЮ (цо╡/GUI), ЯРБНПЕМХИ МЮ НЯМНБЁ РЕУМНКНЦЁ© Adobe Flash. |
|
ВХРЮРЭ
|
|
оЁЯКЪ ГЮБЮМРЮФЕММЪ ЯХЯРЕЛХ Б АЮЦЮРЭНУ ДНДЮРЙЮУ, ЫН БАСДНБСЧРЭЯЪ, ОНБХММЁ АСРХ БХЙНМЮМЁ ОЕБМЁ ДЁ© ОПНРЪЦНЛ ФНПЯРЙН НАЛЕФЕМНЦН РХЛВЮЯНБНЦН БЁДПЁГЙЮ. |
|
ВХРЮРЭ
|
|
нОХЯ ПЁГМХУ БЮПЁЮМРЁБ ЯРБНПЕММЪ МЮЯНЯМН© ЯРЮМЖЁ© Г ЙЮЯЙЮДМХЛ ЙЕПСБЮММЪЛ, ЮМЮКЁГ ©У ОЕПЕБЮЦ РЮ МЕДНКЁЙЁБ, БХАЁП ПЮЖЁНМЮКЭМНЦН БЮПЁЮМРС, НОХЯ МЕНАУЁДМНЦН НАКЮДМЮММЪ |
|
ВХРЮРЭ
|
|
пНГПНАМХЙХ ЯХЯРЕЛ, ЫН БАСДНБСЧРЭЯЪ, БХЪБКЪЧРЭ БЯЕ АЁКЭЬХИ ЁМРЕПЕЯ ДН НОЕПЮЖЁИМН© ЯХЯРЕЛХ Linux. рХЛ МЕ ЛЕМЬ, ЯРЮМДЮПРМЕ ЪДПН Linux МЕ ГЮАЕГОЕВС╨ ОЕПЕДАЮВСБЮМХИ ВЮЯ БЁДЦСЙС. |
|
ВХРЮРЭ
|
|
 юПУХБ ОСАКХЙЮЖХИ юПУХБ ОСАКХЙЮЖХИ |
|
|
|


